Specifies the mode which is used to combine pixels horizontally when BinningHorizontal is enabled (see also Binning).
|
Note that for some camera models BinningHorizontal can only be set along with BinningVertical. |

Name |
BinningHorizontalMode[BinningSelector] |
Category |
|
Interface |
Enumeration |
Access |
Read |
Unit |
- |
Visibility |
Expert |
Values |
Average AverageBayerPattern Sum SumBayerPattern Weighted uEye |
Standard |
SFNC |
Availability uEye+ |
|
Availability uEye |
|
Values description
•Average: The response from the combined cells will be averaged, which results in an increased signal-to-noise ratio.
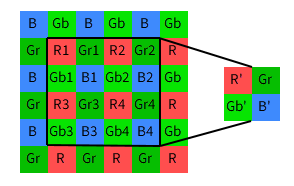
•AverageBayerPattern: Color binning for monochrome sensors where the response of the combined cells is averaged. Color binning on monochrome sensors can cause slight artifacts.
•Sum: The response of the combined cells is summarized, which results in an increased sensitivity.
•SumBayerPattern: Color binning for monochrome sensors where the response of the combined cells is summarized. Color binning on monochrome sensors can cause slight artifacts.
•Weighted: Sensor specific weighting factors for the combined pixels.
•uEye: The binning mode depends on the respective uEye camera (UI model).
The following weighting factors are valid for the Sony sensor IMX183.
 |
|
This feature is not available with the SensorOperationMode "Linescan". |
Code example
C++
// Before accessing BinningHorizontalMode, make sure BinningSelector is set correctly
// Set BinningSelector to "Region0"
nodeMapRemoteDevice->FindNode<peak::core::nodes::EnumerationNode>("BinningSelector")->SetCurrentEntry("Region0");
// Determine the current entry of BinningHorizontalMode
std::string value = nodeMapRemoteDevice->FindNode<peak::core::nodes::EnumerationNode>("BinningHorizontalMode")->CurrentEntry()->SymbolicValue();
// Get a list of all available entries of BinningHorizontalMode
auto allEntries = nodeMapRemoteDevice->FindNode<peak::core::nodes::EnumerationNode>("BinningHorizontalMode")->Entries();
std::vector<std::shared_ptr<peak::core::nodes::EnumerationEntryNode>> availableEntries;
for(const auto & entry : allEntries)
{
if ((entry->AccessStatus()!=peak::core::nodes::NodeAccessStatus::NotAvailable)
&& (entry->AccessStatus()!=peak::core::nodes::NodeAccessStatus::NotImplemented))
{
availableEntries.emplace_back(entry);
}
}
C#
// Before accessing BinningHorizontalMode, make sure BinningSelector is set correctly
// Set BinningSelector to "Region0"
nodeMapRemoteDevice.FindNode<peak.core.nodes.EnumerationNode>("BinningSelector").SetCurrentEntry("Region0");
// Determine the current entry of BinningHorizontalMode
string value = nodeMapRemoteDevice.FindNode<peak.core.nodes.EnumerationNode>("BinningHorizontalMode").CurrentEntry().SymbolicValue();
// Get a list of all available entries of BinningHorizontalMode
allEntries = nodeMapRemoteDevice.FindNode<peak.core.nodes.EnumerationNode>("BinningHorizontalMode").Entries();
List<string> availableEntries = new List<string>();
for(int i = 0; i < allEntries.Count(); ++i)
{
if ((allEntries[i].AccessStatus() != peak.core.nodes.NodeAccessStatus.NotAvailable)
&& (allEntries[i].AccessStatus() != peak.core.nodes.NodeAccessStatus.NotImplemented))
{
availableEntries.Add(allEntries[i].SymbolicValue());
}
}
Python
# Before accessing BinningHorizontalMode, make sure BinningSelector is set correctly
# Set BinningSelector to "Region0" (str)
nodeMapRemoteDevice.FindNode("BinningSelector").SetCurrentEntry("Region0")
# Determine the current entry of BinningHorizontalMode (str)
value = nodeMapRemoteDevice.FindNode("BinningHorizontalMode").CurrentEntry().SymbolicValue()
# Get a list of all available entries of BinningHorizontalMode
allEntries = nodeMapRemoteDevice.FindNode("BinningHorizontalMode").Entries()
availableEntries = []
for entry in allEntries:
if (entry.AccessStatus() != ids_peak.NodeAccessStatus_NotAvailable
and entry.AccessStatus() != ids_peak.NodeAccessStatus_NotImplemented):
availableEntries.append(entry.SymbolicValue())